约 个字 行代码 预计阅读时间 分钟
Real-Time Ray Tracing
Real-Time Ray Tracing
Basic Idea
RTR 领域某笑话——人们宣称:“光线追踪是未来,并且将一直会是未来。”
不过 2018 年,NVIDIA 宣布了 GeForce RTX 系列(图灵架构(Turing architecture))显卡,老黄说会开启一个 2500 亿美元的市场(现在来看,他根本没想到 AI 会让 NVIDIA 的年收入接近这个数字)。
RTX 能做以下事情(一些关于 RTRT(实时光线追踪)的 demo):
实际上,RTX 能实现高级的光线追踪效果:

之所以 RTX 系列显卡在光线追踪上取得突破性进展,是因为它有一些有利于提升光线追踪的硬件,比如张量核心(tensor core)等。它能做到每秒追踪 10G(100 亿)根光线,相当恐怖!
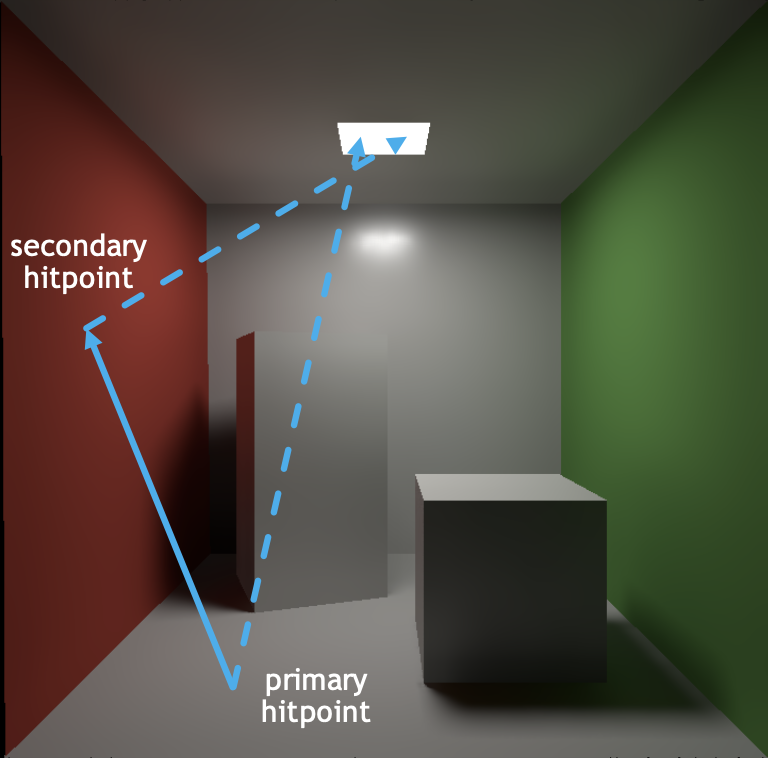
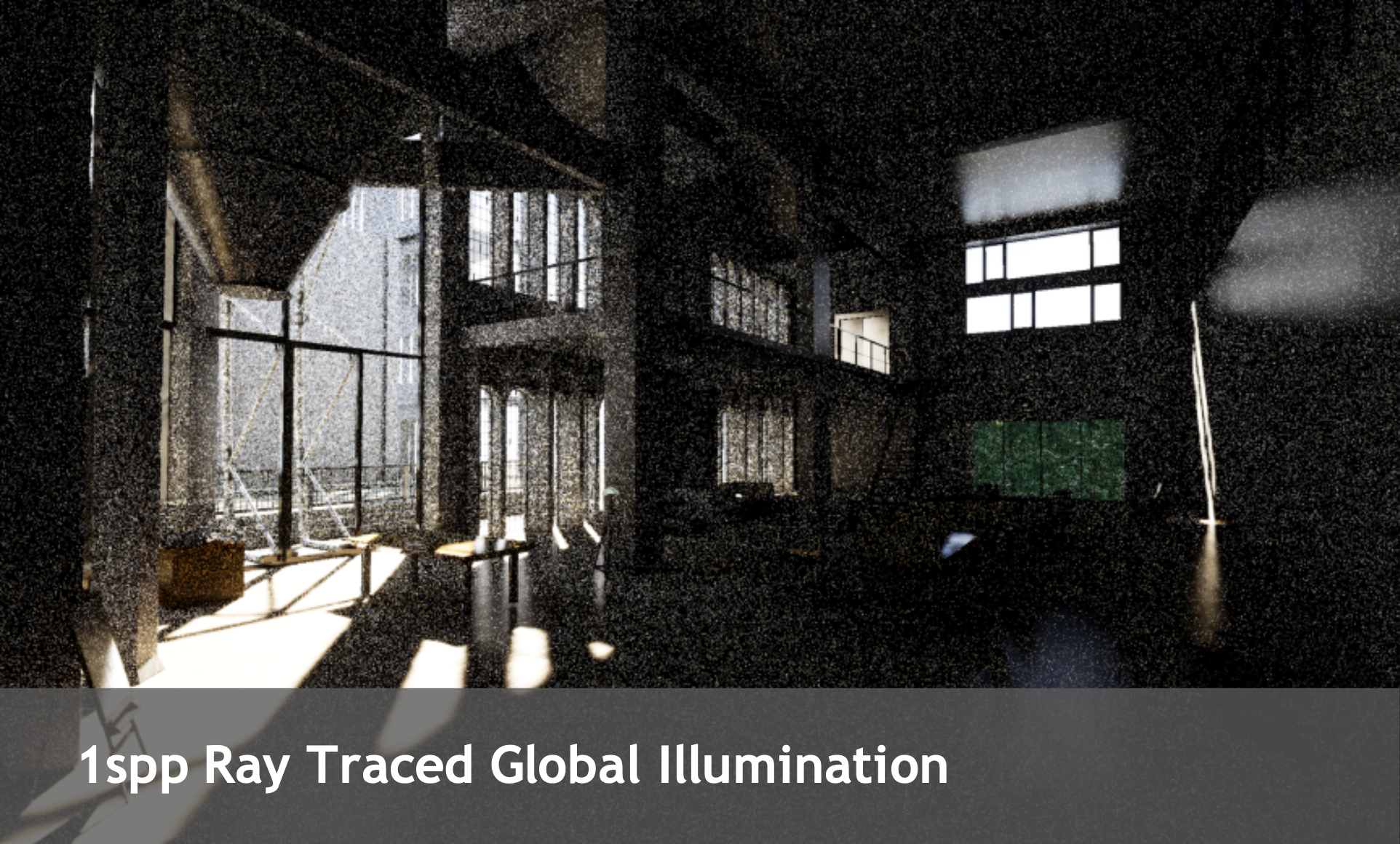
在实时应用中,这就对应了一个每像素采样(sample per pixel, SPP)。单个 SPP 的路径追踪包括:
- 1 次光栅化(主)
- 1 条光线(主可见性)
- 1 条光线(二次弹射)
- 1 条光线(次可见性)
RTRT 本身其实并没有多大创新,它的突破来自硬件能力的升级。由于路径追踪用的是蒙特卡洛积分法,自然无法避免噪点问题。所以 RTRT 的一项关键技术是降噪(denoising)。

SOTA(其实是 19 年)的降噪例子

Motion Vector
在介绍具体方法前,我们先明确一下目标:
- 质量:不能有过度模糊和瑕疵,保留所有细节...
- 速度:对一个帧降噪(这只是渲染的一个小环节)的速度 <2ms
但实际上要同时达成上述两个目标是做不到的事。学术界的相关研究有:
- 剪切滤波(shear filtering)系列:SF、AAF、FSF、MAAF 等
- 其他离线滤波(offline filtering)方法:IPP、BM3D、APR 等
- 深度学习系列:CNN、自动编码器等
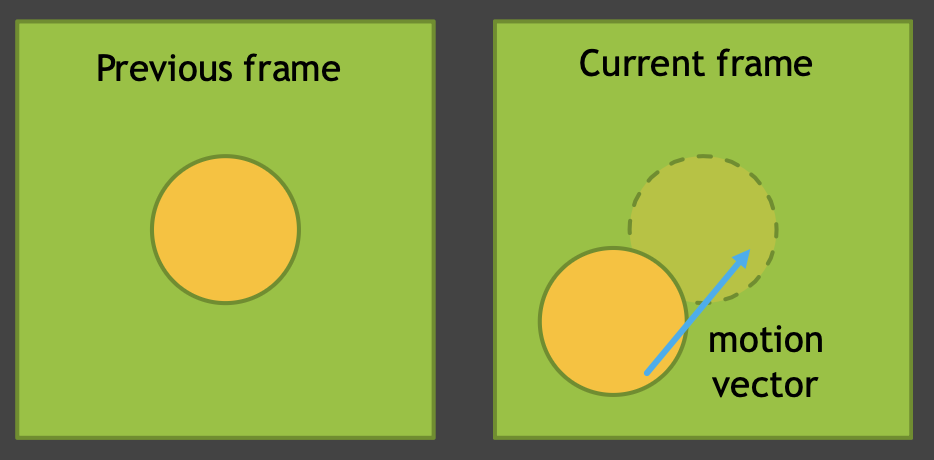
在业界的解决方案中,最重要的思想是时间(temporal):
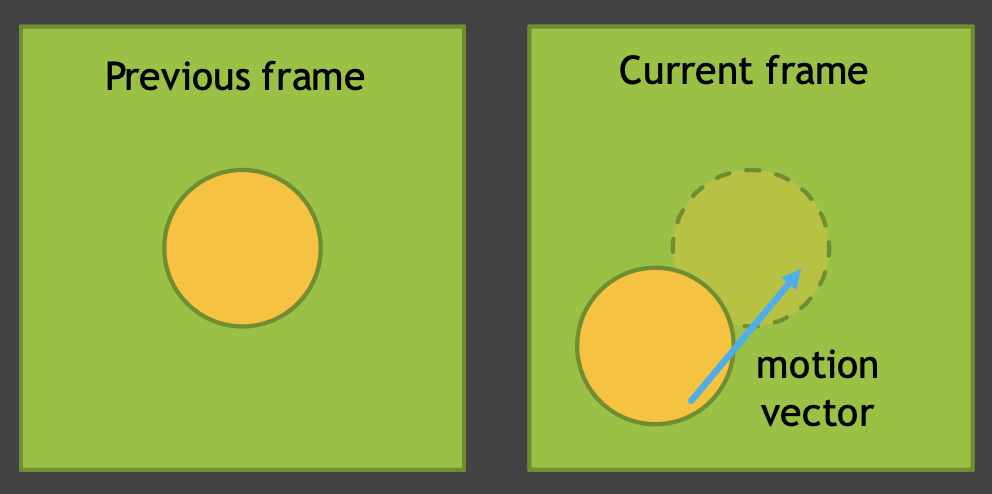
- 假设当前帧已经降过噪了,那我们就可以复用这一帧
- 使用运动向量(motion vector)来寻找前一个位置
- 本质上是增加了 SPP
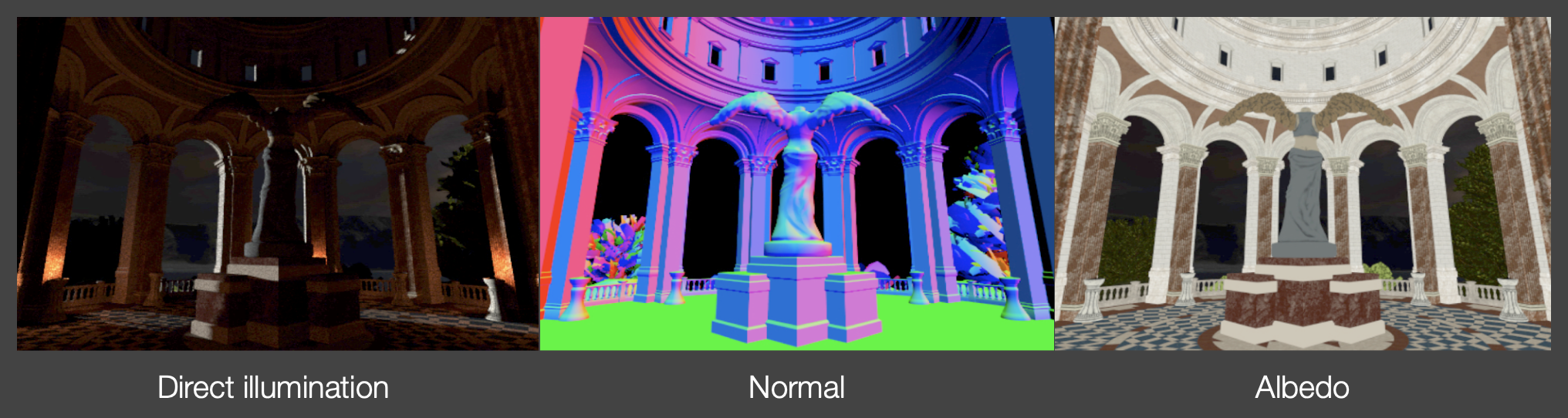
几何缓冲区(G-buffer)
- 渲染过程中免费获取的辅助信息(不是 100% 的免费,但生成 G-buffer 是一个轻量级的操作)
- 通常包括世界坐标、每像素深度、法线、世界坐标等仅限于屏幕空间的信息
记当前帧为 \(i\),那么上一帧就是 \(i - 1\)。现在就要找第 \(i - 1\) 帧中的哪个像素包含了和第 \(i\) 帧中像素 \(x\) 相同的位置或点。
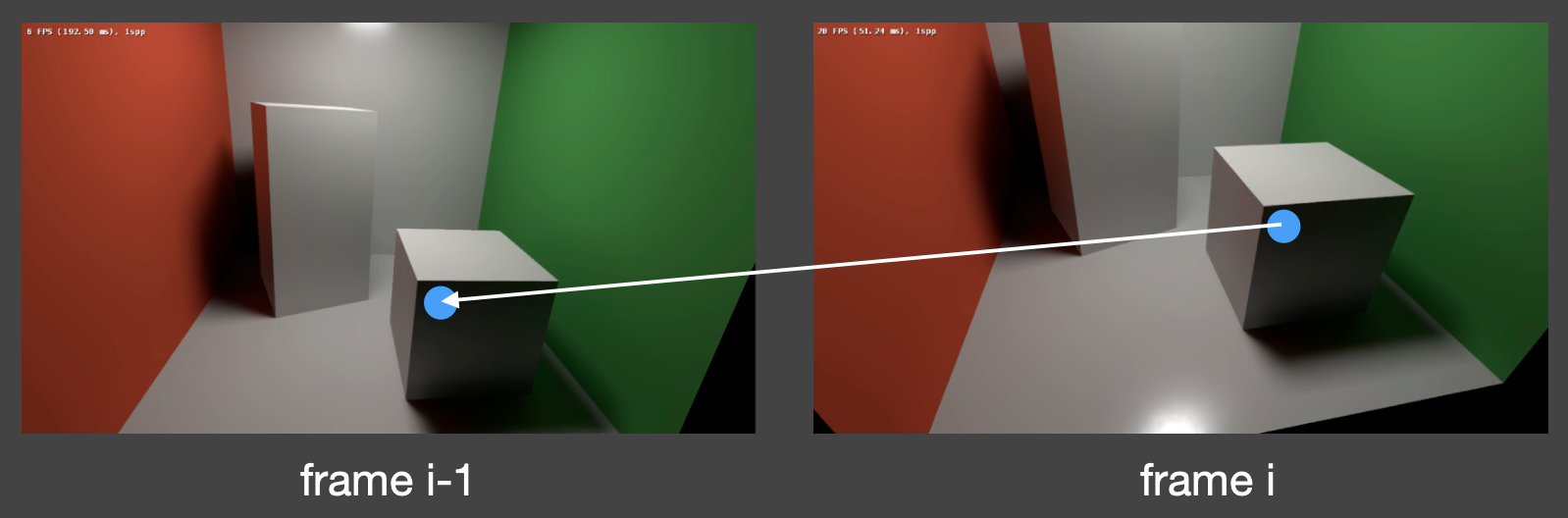
这便是反向投影(back projection)或者说求运动向量(motion vector),具体操作如下:
- 如果世界坐标 \(s\) 存在 G-buffer 中,那么可直接拿来用
- 否则 \(s = M^{-1}V^{-1}P^{-1}E^{-1}x\)(计算时仍需带有 \(z\) 分量;\(E\) 为视口变换)
- 由于运动已知:\(s' \xrightarrow{T} s\),因此 \(s' = T^{-1} s\)
- 将第 \(i - 1\) 帧中的世界坐标投影到屏幕上:\(x' = P'V'M's'\)
注:加撇号的表示上一帧的东西。
Temporal Accumulation / Filtering
记号约定
- \(\sim\):未滤波的
- \(\text{-}\):滤波好的
对于当前帧(第 \(i\) 帧):
两行公式分别对应空间和时间上的滤波。其中 \(\alpha\) 的取值在 0.1 到 0.2 之间,换句话说就是 80-90% 的贡献来自上一帧。
效果

可以看到去噪前的渲染结果较暗,这是因为有噪点时,像素值上下浮动,可能存在像素值超过 255 的情况,此时会被裁剪到 255 这个值,因此那些特别亮的点就会变暗,整体也会变暗。

Failure Cases
但这一方法也有失效的时候,比如:
-
切换场景或镜头(需要有个预热期(burn-in period)累积几帧)
-
在走廊里倒着走(屏幕空间问题)

-
突然出现的背景(去遮挡(disocclusion))

- 如果无视这一问题,就会带来拖尾(lagging)的效果
例子
解决方法有:
- 约束(clamping):将“上一帧的值”向当前帧的范围进行限制
- 检测(detection):
- 使用如对象 ID 等来检测时间性失败
- 以二值或连续形式调整 \(\alpha\)
- 可能得加强/扩大空间滤波
问题:重新引入噪声(现在更依赖于当前帧,而上一帧才是没有噪点的)
例子
该方法在着色上也有可能会失效:
-
考虑带有移动光源的“栅栏”场景,其中阴影的运动向量为 0,因为柱子几何位置关系没发生变化,这样的结果是阴影拖尾严重
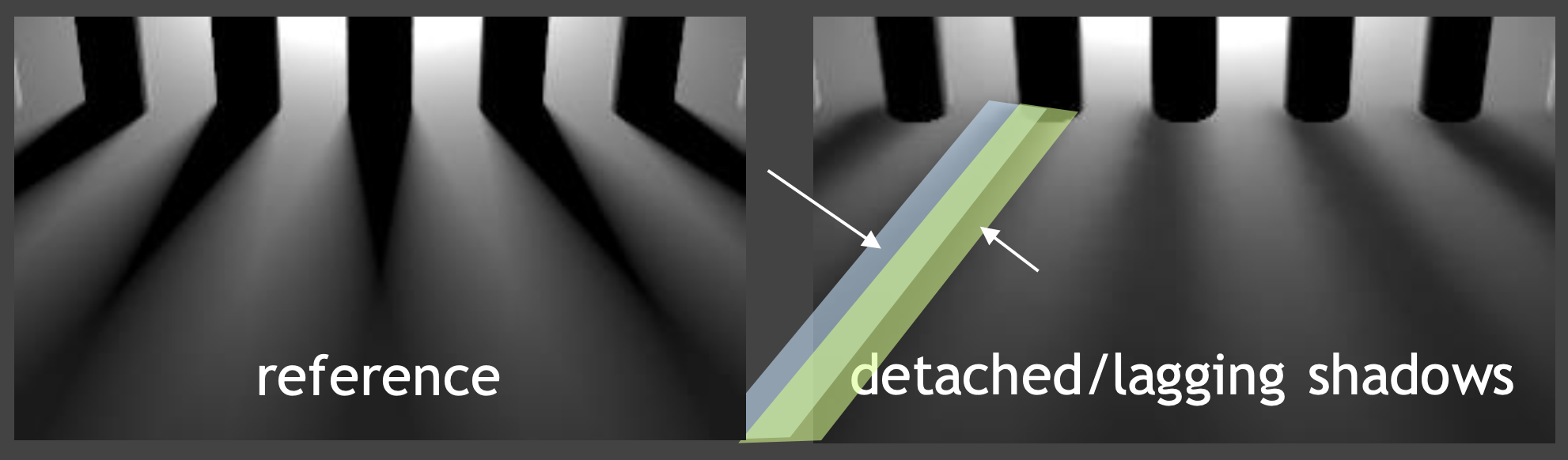
例子

-
考虑移动椅子,其中光泽反射图像(glossy reflected images)的运动向量也为 0,因为地板没有动,地板上的点的几何属性自然没发生变化

例子
注
- 时间累积的思想受到 TAA(时间反走样)的启发(时间复用本质上提高了采样率)
- 有研究(就是闫老师的团队)着手缓减该方法在部分场合失效的问题
Implementing Spatial Filters
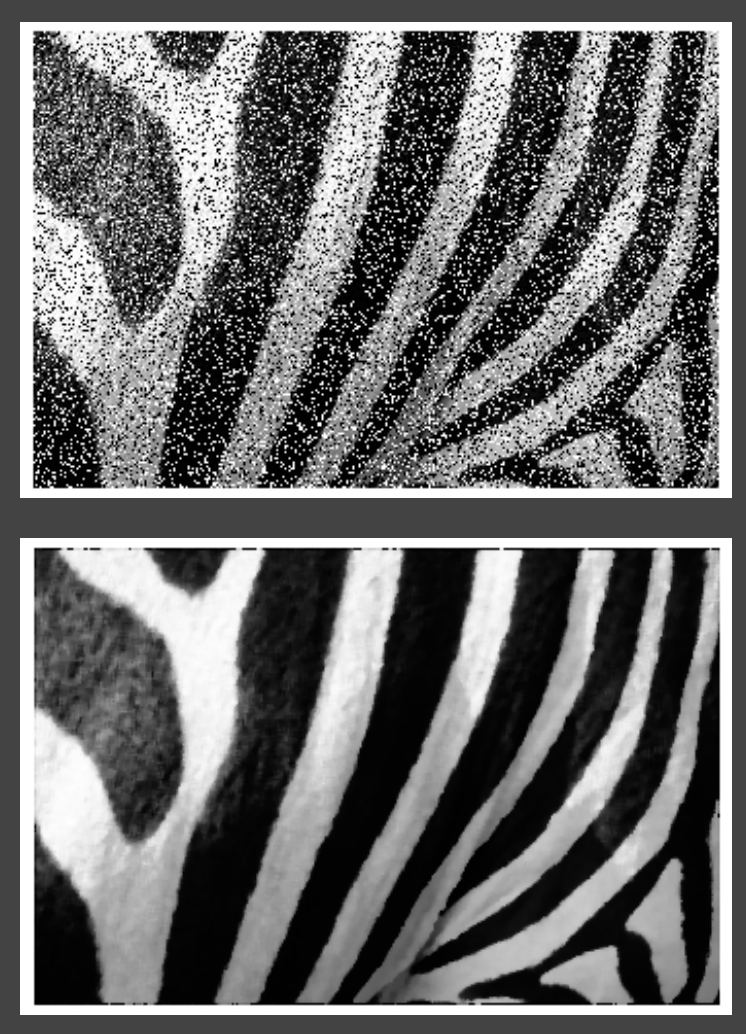
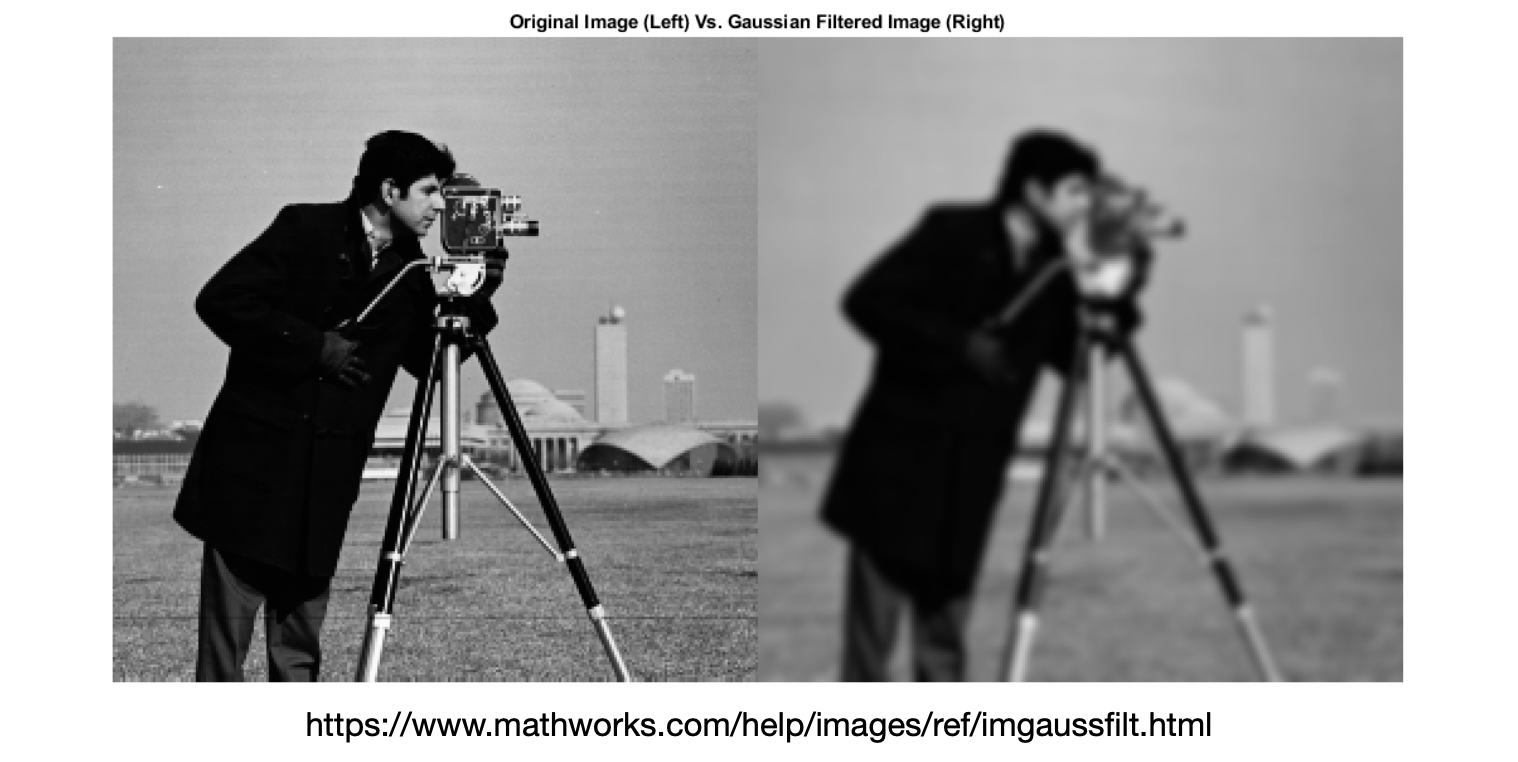
假如我们想对一张图像(做低通)滤波,也就是要移除图像中(通常是高频)的噪点。
注:我们目前只专注于空间域。
- 输入:
- 带噪点的图像 \(\tilde{C}\)
- 滤波核 \(K\)(对每个像素而言值可以不同)
- 输出:滤波过的图像 \(\bar{C}\)
我们假设(2D)高斯滤波器的中心位于像素 \(i\)。\(i\) 领域内的任何像素 \(j\) 都会做出贡献,贡献量取决于 \(i, j\) 间距。伪代码如下:
For each pixel i
sum_of_weights = sum_of_weighted_values = 0.0
For each pixel j around i
Calculate the weight w_ij = G(|i - j|, sigma)
sum_of_weighted_values += w_ij * C^{input}[j]
sum_of_weights += w_ij
C^{output}[I] = sum_of_weighted_values / sum_of_weights
- 维护
sum_of_weights,以便最后对结果进行归一化处理 - 测试
sum_of_weights是否为零(针对其他核) - 颜色可以是多通道的
- 一般认为超过 \(3 \sigma\) 距离的像素不会产生任何贡献
Bilateral Filtering
高斯滤波的问题:同时也模糊了边界,但这是我们想要保留的高频信号。
观察发现,边界 <-> 剧烈变化的颜色。于是我们有了以下解决思路:
- 若像素 \(j\) 与像素 \(i\) 相差太大,则降低 \(j\) 的贡献
- 仅向核加入更多控制
效果

Joint Bilateral Filtering
可以看到,高斯滤波仅有「距离」这一指标,而双边滤波有「位置距离」和「颜色距离」两个指标。那么为了得到更好的滤波效果,我们是不是可以引入更多的特征呢?这便是联合双边滤波(joint bilateral filtering)(或跨双边滤波(cross bilateral filtering))所做的事。
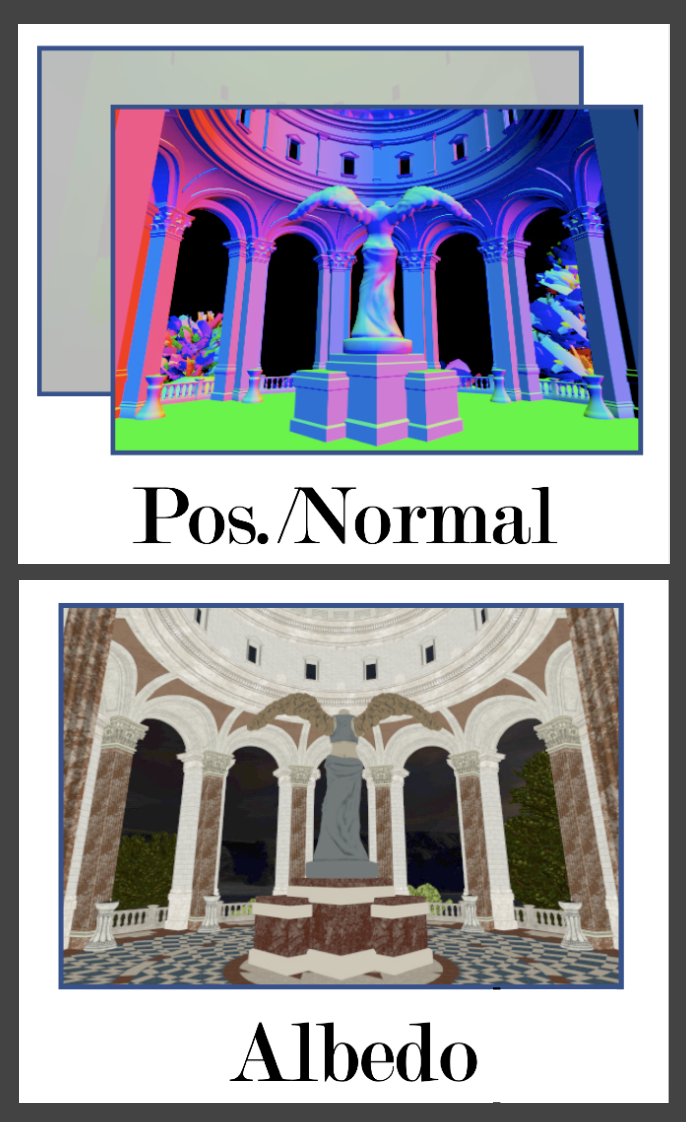
该技术很适合用在路径追踪渲染结果的去噪上,因为 G-buffers 中保留了很多特征,包括法线、深度、位置、对象 ID 等大多数与几何相关的属性。且这些特征是无噪声的(noise-free),因为它们和光线的多次弹射无关。
注
- 指标本身无需归一化,因为滤波时就做好了归一化
-
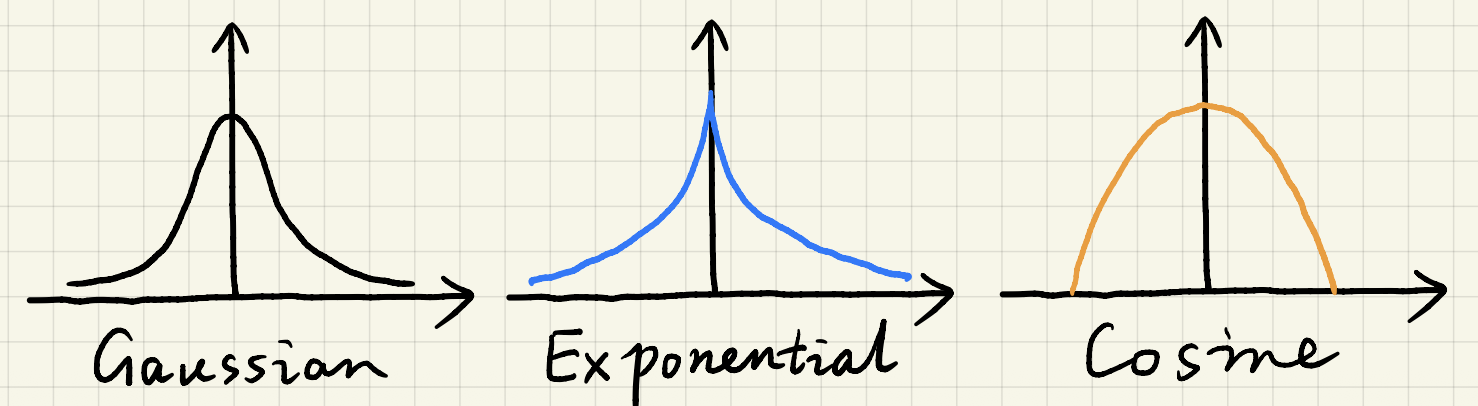
- 任何能随「距离」增长而衰减的函数都是可行的
- 比如(绝对值)指数函数、(裁剪后的)余弦函数等
高斯不是唯一的选择:
例子
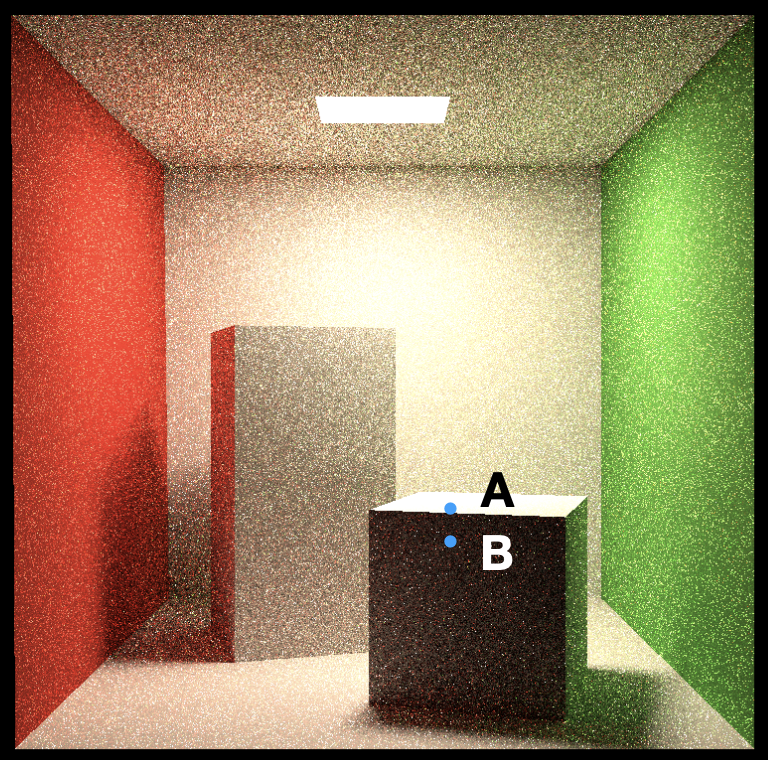
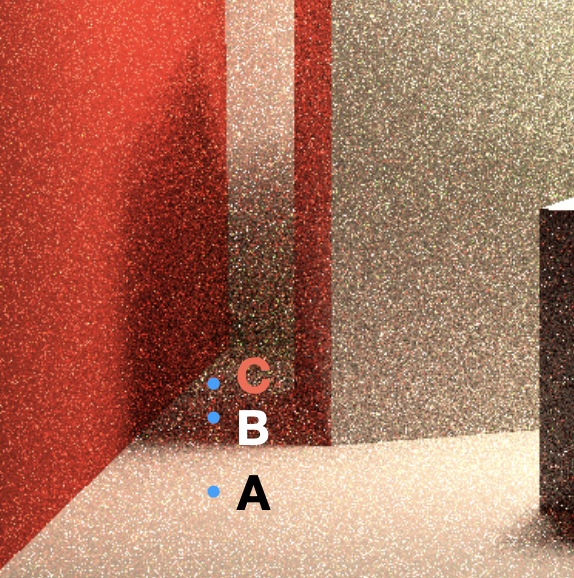
假如我们仅考虑深度、法线和颜色。那我们为什么不去模糊下图这些点之间的边界呢?
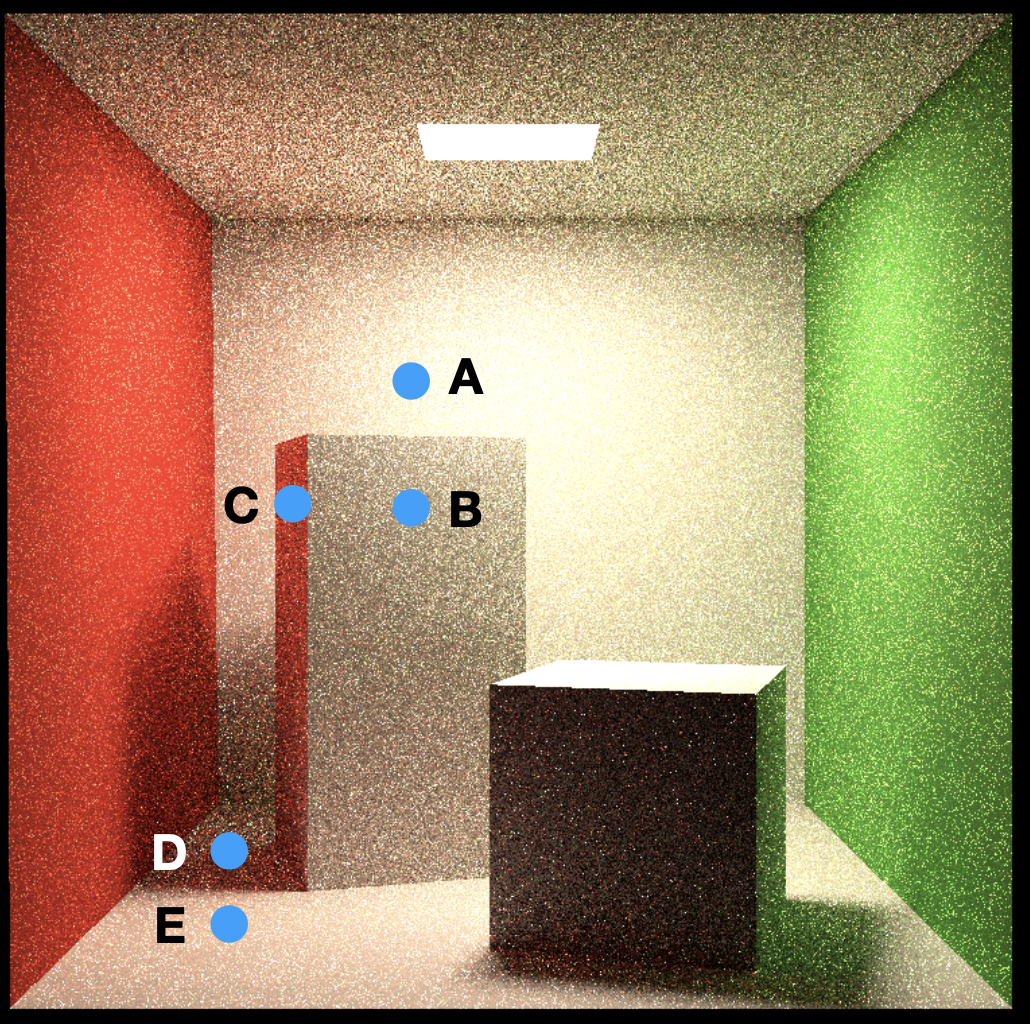
- A 和 B:深度不同
- B 和 C:法线不同
- D 和 E:颜色不同
Implementing Large Filters
回忆一下:在滤波过程中,对于每个像素,我们需要遍历 NxN 大小的邻域。滤波器大小较小时,这样做是可以接受的;但滤波器很大的话,那计算成本就太大了。为此,下面提供一些解决方案。
-
单独的趟次(separate passes)
- 对于一个 2D 高斯滤波器,将其划分为一个水平趟次(1xN)和一个垂直趟次(Nx1)
- 查询次数:N2 -> N + N
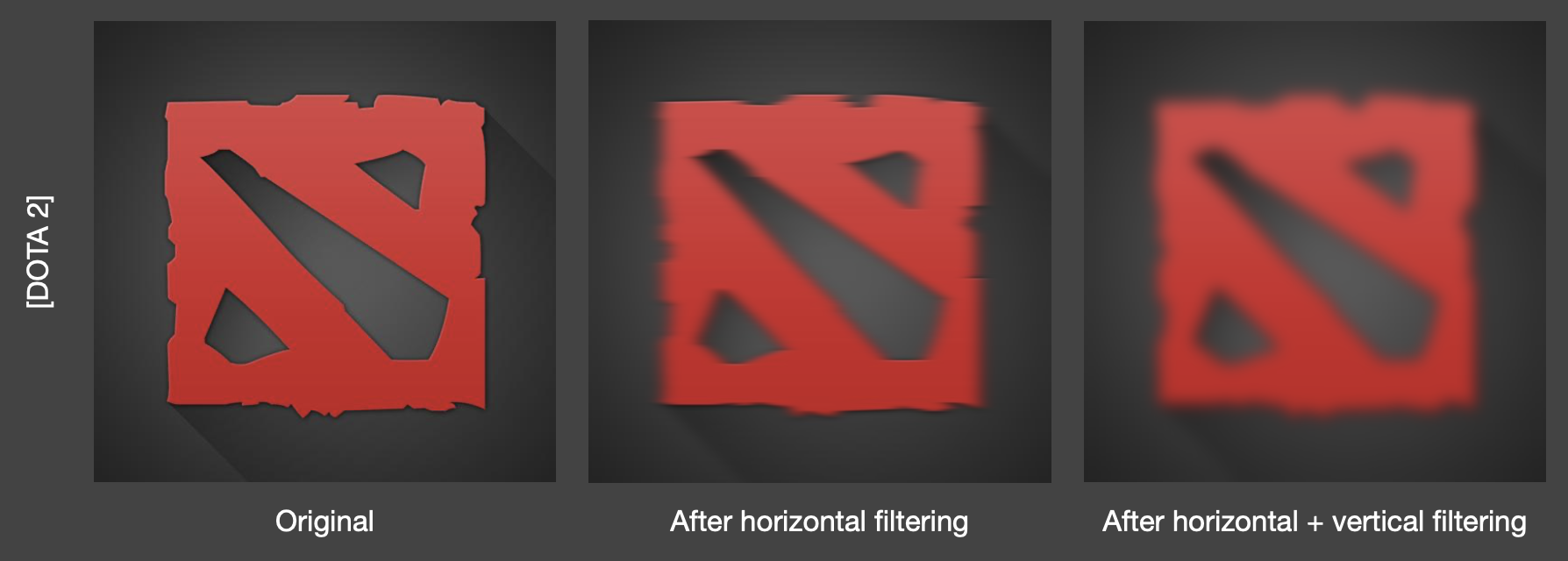
- 更深层的理解:将一个 2D 高斯滤波器分为两个 1D 高斯滤波器
- 2D 高斯滤波核是可分离的:\(G_{2D}(x, y) = G_{1D}(x) \cdot G_{1D}(y)\)
-
滤波 == 卷积,于是:
\[ \iint F(x_0, y_0)\, G_{2D}(x_0 - x, y_0 - y)\, dx\, dy = \int \left(\int F(x_0, y_0)\, G_{1D}(x_0 - x)\, dx \right) G_{1D}(y_0 - y)\, dy \] -
因此,分离的趟次需要可分离的滤波核(即理论上,双边滤波器无法单独实现)
-
渐进增长的大小(progressively growing sizes)
- 思路:使用渐进增长的大小进行多次滤波
-
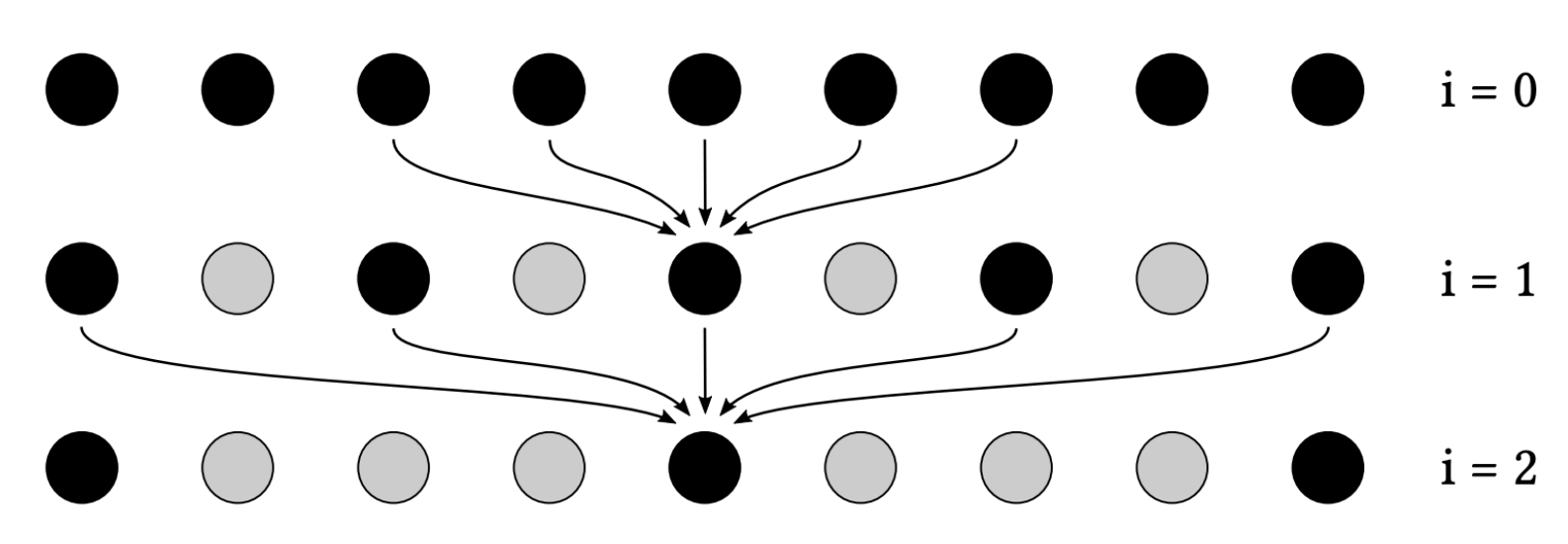
a-trous 小波(就是一个滤波器)
- 多次处理,每次使用 5x5 滤波器
- 样本间的间隔逐渐增大(\(2^i\))
- 比如 \(64^2\) 大小的滤波器变为了 \(5^2 \times 5\)
-
更深层的理解:
- 采用增长的大小是因为:应用更大的滤波器 == 移除更低频的信号(左图)
- 跳过某些采样点之所以是安全的,是因为:采样 == 重复频谱(spectrum)(右图)
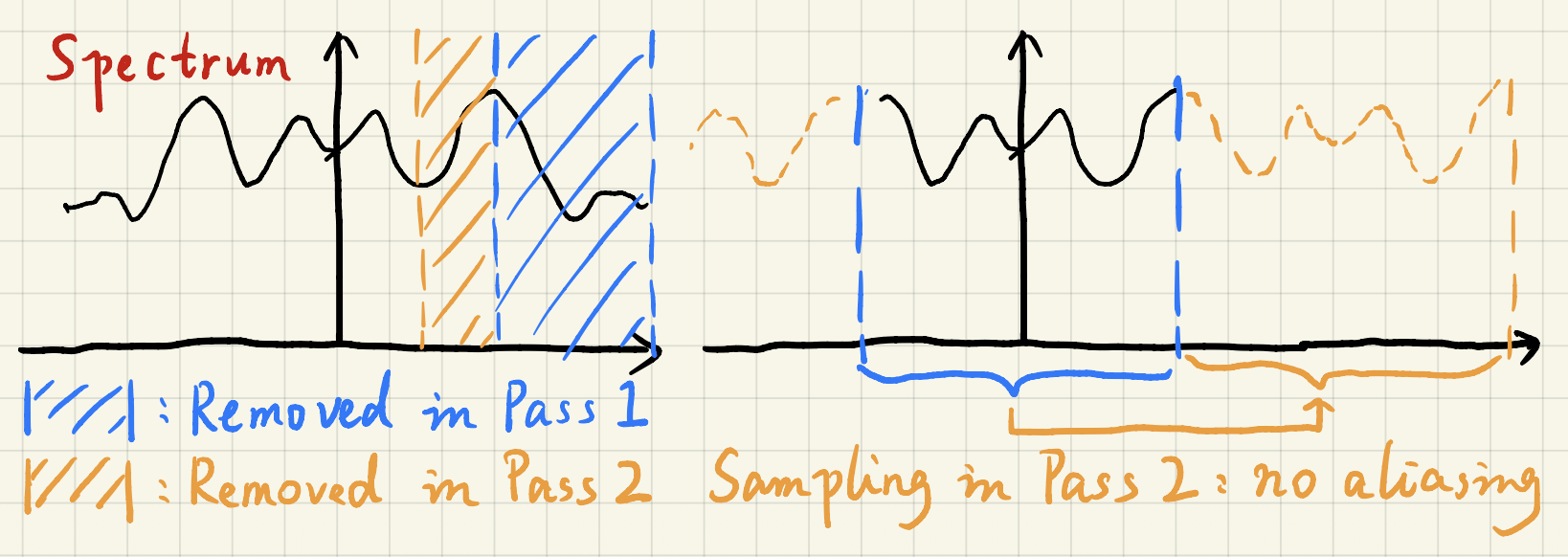
-
问题:可能会保留一些格子状的瑕疵
注
上述滤波方法也可用在对 PCSS、SSR 等的去噪上。
Outlier Removal
需要注意的是,滤波并非万能。有时滤波后的结果仍会带有噪声,甚至出现块状(blocky)瑕疵,这主要是由极端明亮的像素点(异常点(outliers))引起的。

好消息是,我们可以在滤波前就移除这些异常点。
-
异常点检测
- 对于每个像素,查看其邻域(比如 7x7 大小)
- 计算均值和方差
- 在 \([\mu - k\sigma, \mu + k\sigma]\) 范围外的值 -> 异常点
-
异常点移除
- 将任何在上述范围之外的值约束(clamp)在这一有效范围内
- 注意:这并不等于抛弃(设置成零值)这些异常点
- 这和之前介绍的
复习:时间约束(temporal clamping)
之前讲时间累积/滤波时也提到过类似的概念——直接使用上一帧的颜色可能会带来拖尾效果,原因是 \(C^{(i-1)}\) 可能和 \(\bar{C}^{(i)}\) 完全不一样。于是在时间复用中,我们将 \(C^{(i-1)}\) 约束到和 \(\bar{C}^{(i)}\) 足够接近:
- 时间约束是噪点与拖尾问题之间的权衡
- 注意约束方向是从 \(C^{(i-1)}\) 到 \(\bar{C}^{(i)}\),反过来是不行的!
Specific Filtering Approaches for RTRT
Spatiotemporal Variance-Guided Filtering (SVGF)
时空方差引导滤波(spatialtemporal variance-guided filtering, SVGF)和基本的时空去噪方法非常类似,但它还引入了额外的方差分析和技巧。

上图被划分为三部分,从左到右依次为去噪前(1SPP)、去噪后的结果和基准事实(高 SPP,比如 1024)。
该技术包含 3 个引导滤波的因素:

- 深度 \(w_z = \exp \left(-\dfrac{|z(p) - z(q)|}{\sigma_z |\nabla z(p) \cdot (p - q)| + \varepsilon}\right)\)
- A 和 B 位于同一平面上,颜色相近,因此它们应该相互影响
- 但 A 和 B 之间的深度差异很大
- 因此最好使用相对于切平面(tangent plane)的深度差
- 法线 \(w_n = \max(0, n(p) \cdot n(q))^{\sigma_n}\)
- 不必是高斯分布
- 如果存在法线贴图,请使用宏法线(macro normals)(即算出来的法线而非法线贴图提供的法线)
- 亮度(luminance)(灰度颜色值)\(w_l = \exp \left(-\dfrac{|l_i(p) - l_i(q)|}{\sigma_l \sqrt{g_{3 \times 3}(\text{Var}(l_i(p)))} + \varepsilon}\right)\)
- 在 7x7 大小的空间中计算方差
- 使用运动向量在时间上求平均值
- 在使用前再进行 3x3 的空间滤波
深度和亮度计算公式中分母的 \(\varepsilon\) 是为了预防出现差值 = 0 时会除以 0 的情况。
结果
失败案例
存在阴影残影现象,因为物体没动,光源动,运动向量为 0,阴影就会沿用上一帧的结果。
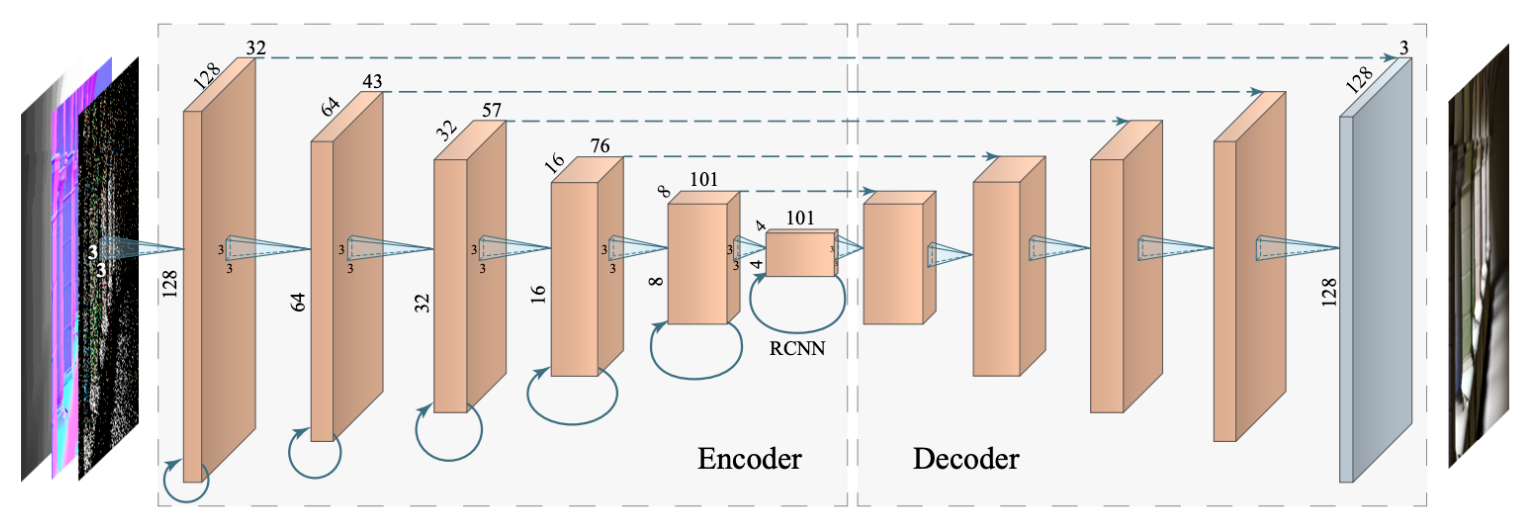
Recurrent AutoEncoder (RAE)
另一种技术是循环自编码器(recurrent autoencoder, RAE)。
- 它是一种做去噪的后处理网络
- 需要借助 G-buffer
- 它会自动执行时间累积
关键的架构设计包括:
-
自编码器(或 U-Net)结构:通过跳过/残差连接,实现更快更好的训练
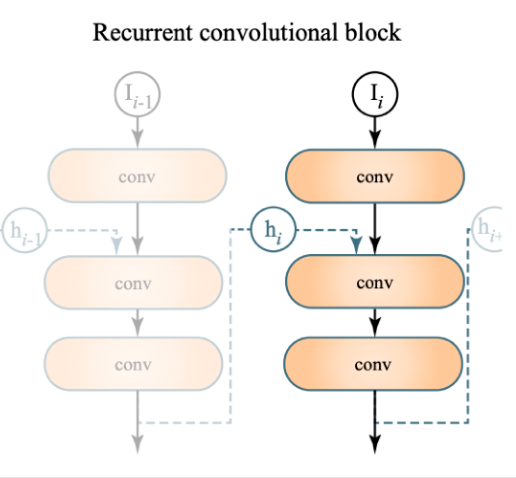
-
循环卷积块:积累(并逐渐忘记)来自先前帧的信息
结果
比较
| 方法 | 质量 | 伪影 | 性能 | 可解释性 | 论文发表地 |
|---|---|---|---|---|---|
| SVGF | 干净 | 重影 | 快 | 是 | HPG |
| RAE(刚提出时) | 过度模糊 | 重影 | 慢 | 否 | SIGGRAPH |
评论区