约 个字 行代码 预计阅读时间 分钟
A Glimpse of Industrial Solutions
Anti-Aliasing
回顾:为何需要反走样?
由于光栅化时每像素采样数不够多,因此最终的解决方案是用更多的采样点。
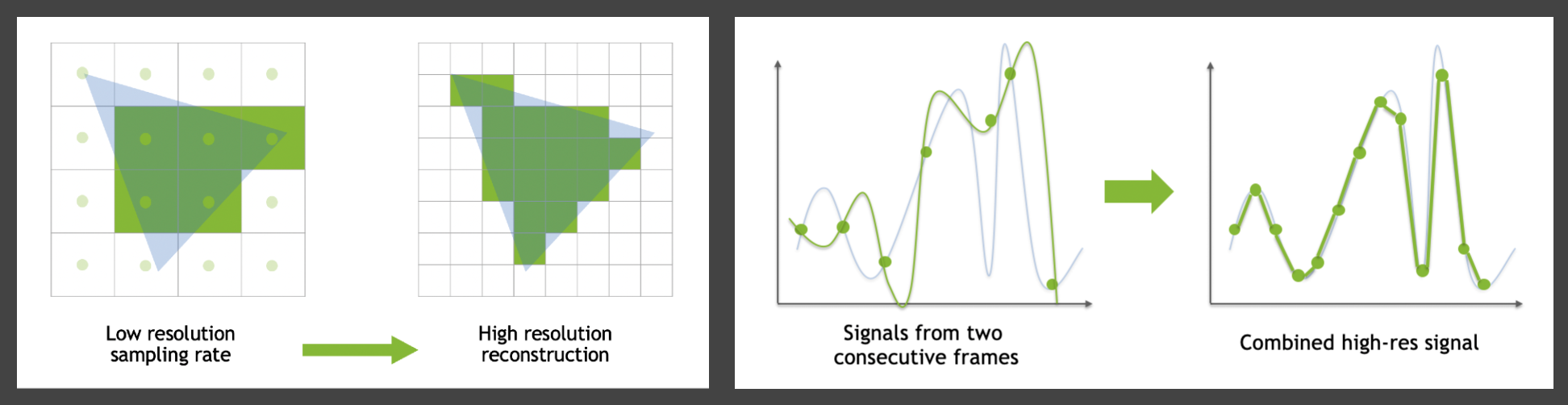
Temporal Anti-Aliasing
时间反走样(temporal anti-aliasing)的特点:
- 跨帧(时间)分发/重用样本
- 与 RTRT 几乎完全相同
- 比如使用上一帧像素左上角的采样点,再上一帧像素右上角的采样点,右下,左下...
Notes on Anti-Aliasing
-
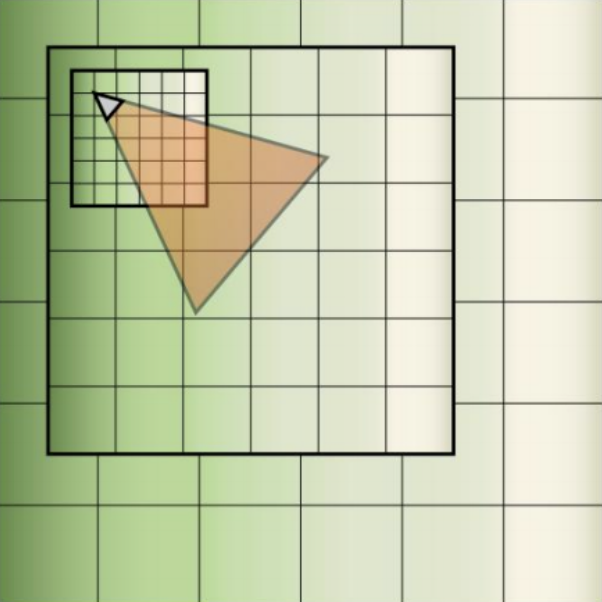
MSAA(多采样)vs SSAA(超采样)
-
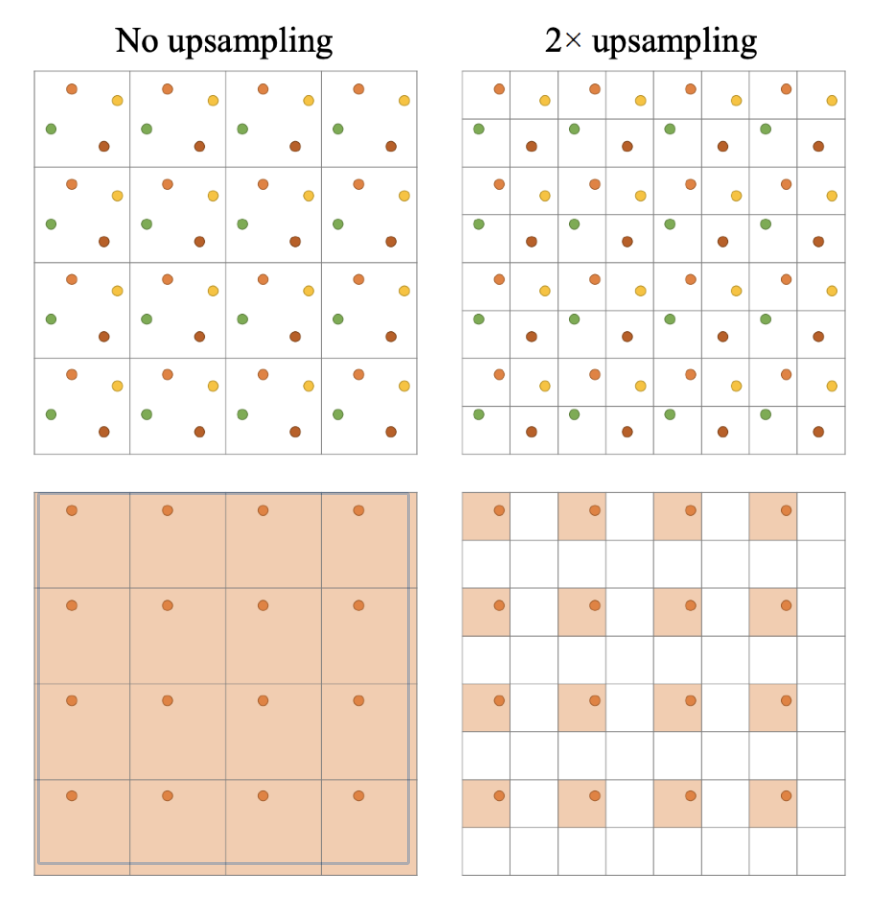
SSAA 比较直接
- 先以更大的分辨率渲染,再降采样
- 最终的解决方案,但是成本高
-
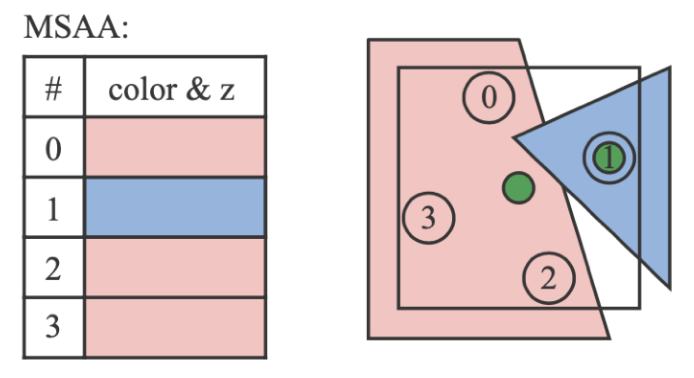
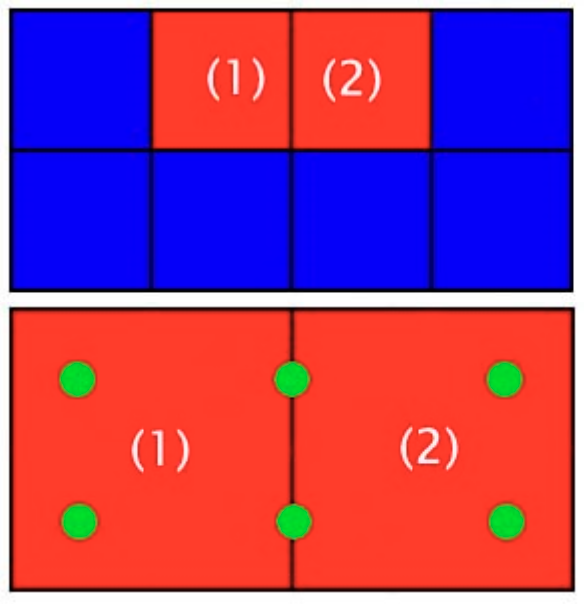
MSAA 能改进性能
-
相同图元只渲染一次
-
像素间复用采样点,从而节省采样数(比如下图中间两个采样点既可算作对像素 1 的贡献,也可算作对像素 2 的贡献)
-
-
-
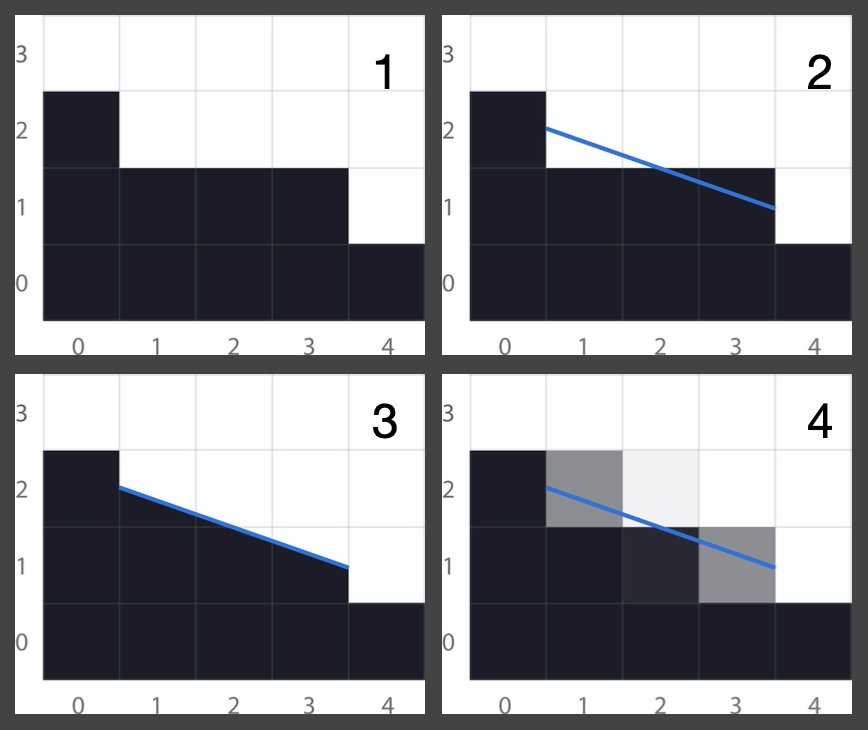
最先进的基于图像的反走样解决方案
- SMAA(增强型子像素形态抗锯齿(enhanced subpixel morphological AA))
- 发展历程:FXAA -> MLAA(形态(morphological)抗锯齿)-> SMAA
-
不要对 G-buffer 进行反走样操作
Super Sampling and DLSS
超分辨率(super resolution)(或超采样)的字面理解就是增加分辨率。相关的经典技术便是 DLSS(深度学习超采样(deep learning super sampling))。
- DLSS 1.0:毫无来由 / 纯属猜测
- DLSS 2.0:另一种类 TAA 的应用,通过复用时间采样来提升分辨率
DLSS 2.0 遇到的主要问题是:一旦时间层面出现问题,约束(clamping)不再是一个可行项,因为对于每个更小的像素都需要知道其确切值。因此关键在于找到一个更好的利用时间信息的方案。
结果



一个重要的实际问题是:如果 DLSS 本身每帧运行需 30ms,那它就已经失效了。解决方法是采用网络推理性能优化(机密内容)。
相对应 DLSS 的技术有:
- AMD:Fidelity FX 超分辨率技术
- Facebook:实时渲染的神经超采样技术
Shading
Deferred Shading
- 原本用于节省着色时间
-
考虑光栅化过程
- 三角形 -> 片元 -> 深度测试 -> 着色 -> 像素
- 每个片元都需要着色(在什么场景下?)
- 复杂度:O(片元树 * 光源数)
-
关键观察:由于深度测试/遮挡,大多数片元在最终图像中不可见,所以可以只对可见的片元着色
-
修改光栅化流程:
- 只需对场景进行两次光栅化
- 第一遍:不进行着色,仅更新深度缓冲区
- 第二遍相同,但由于现在可从深度缓冲区得知最近的片元,所以能保证仅对可见片元着色
- 隐含假设:对场景进行光栅化远快于对所有不可见片元进行着色(通常成立)
- 复杂度:O(片元数 * 光源数) -> O(可见片元数 * 光源数)
-
问题:难以实现抗锯齿
- 但可通过 TAA 几乎完全解决这一问题
Tiled Shading
另一种改进方法是块着色(tiled shading),即将屏幕细分为块(tile)(比如 32x32 大小),然后对每个块进行着色。
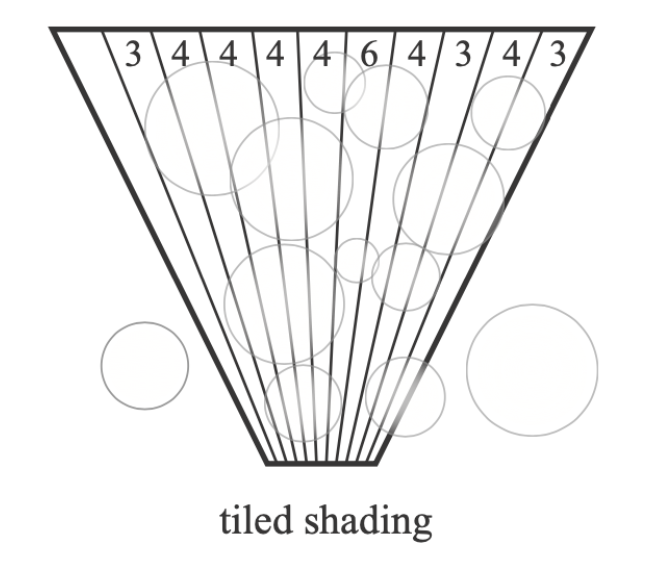
- 并非所有光源都能照亮特定块,主要是因为距离平方衰减
- 复杂度:O(可见片元数 * 光源数) -> O(可见片元数 * 每块平均光源数)
Clustered Shading
更进一步的改进技术是簇着色(cluster shading)。它将每个块进一步细分为不同的深度段,本质上将视锥体细分为 3D 网格。
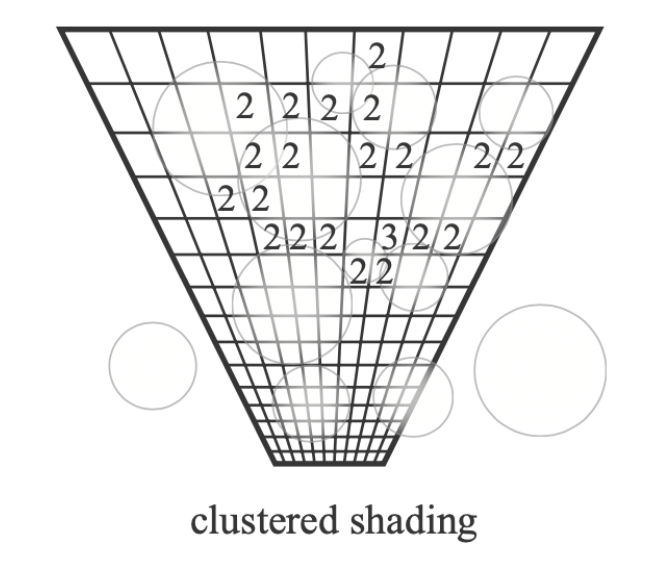
- 每个块的深度范围可能相当大
- 因此可能会识别出具有照亮该块能力的大量光源
- 但有些光源可能只照亮一个较小的深度范围
- 复杂度:O(可见片元数 * 每个块的平均光源数) -> O(可见片元数 * 每个簇的平均光源数)
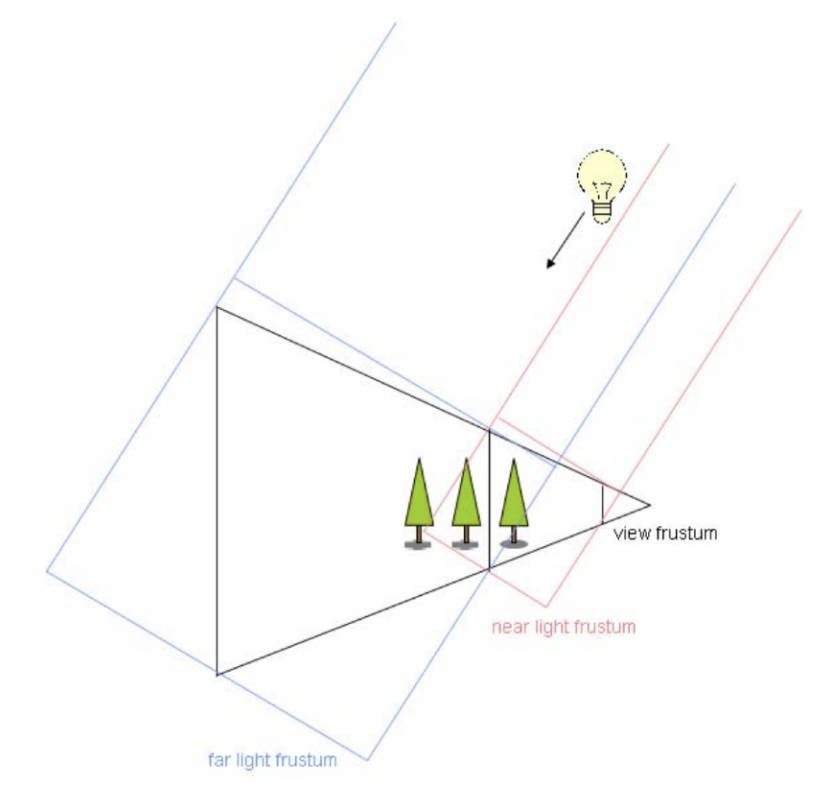
Level of Detail Solutions
细节层次(LoD)非常重要,因为选择合适的细节层次可以节省计算资源,比如之前介绍过的纹理 MIPMAP 技术便是一种 LoD。而多级 LoD 的应用在 RTR 领域中常被称为「级联」(cascaded)。
例子
关键挑战
- 不同层级之间的过渡
- 通常在边界附近需要一定的重叠(overlapping)与混合(blending)
另一个例子:几何 LoD
- 预先生成一组简化的具有不同数量三角形的对象
- 根据与摄像机的距离,选择合适的对象(或对象的一部分)进行显示,确保没有三角形大于一个像素
- 由 TAA 解决跳变伪影的问题
- 这就是 UE5 中的 Nanite 技术(当然 Nanite 的功能远不止于此)
一些(较为严重的)技术难题
- 不同地点存在不同层级,裂缝(cracks)问题如何处理?
- 动态加载与调度不同层级时,如何最优利用缓存和带宽等资源?
- 使用三角形还是其他几何纹理来表示几何体?
- 如何通过裁剪(clipping)与剔除(culling)提升性能?
- ...
Global Illumination Solutions
通过前面的学习,我们知道:
- 屏幕空间光线追踪(SSR)有时会失效,比如超出屏幕外,不在相机内等
- 没有一种 GI 解决方案能完美适用于所有情况,除了实时光线追踪(RTRT),但现在完全使用 RTRT 的成本仍然过高
因此业界倾向于采用混合的解决方案:
- 使用 SSR 进行粗略的全局光照近似
- 当 SSR 失效时,切换到更复杂的光线追踪
-
无论是硬件(RTRT)还是软件(?)方式
-
软件光线追踪
- 近距离单个物体 -> HQ SDF(高质量有符号距离场)
- 整个场景 -> LQ SDF(低质量有符号距离场)
- 存在强方向光或点光源时的 RSM(反射阴影贴图)
- 在 3D 网格中存储辐照度的探针(动态漫反射全局光照,即 DDGI)
-
硬件光线追踪
- 不必使用原始几何体,可采用低多边形代理(low-poly proxies)
- 探针(RTXGI)
-
混合这些加粗标注的方法,就得到了 UE5 的 Lumen 技术
-
评论区